Full hệ thống lái trang bị trên ô tô hiện nay
Từ khi ô tô ra đời cho đến nay, hệ thống lái được cải tiến không ngừng để đáp ứng các tiêu chí về an toàn và tiện nghi; tính an toàn chủ động trong điều kiện chuyển động với vận tốc cao và mật độ các phương tiện tham gia giao thông lớn. Quá trình phát triển các hệ thống lái trên xe ô tô. Có thể liệt kê thành các hệ thống lái sau: hệ thống lái thuần cơ khí, hệ thống lái trợ lực thủy lực, hệ thống lái trợ lực thủy lực điều khiển điện, hệ thống lái trợ lực điện, hệ thống lái tích cực, hệ thống lái Steer by wire, hệ thống lái tự động. Garatructuyen xin tóm tắt hệ thống lái trang bị trên ô tô để Bạn có thể hiểu rõ hơn.
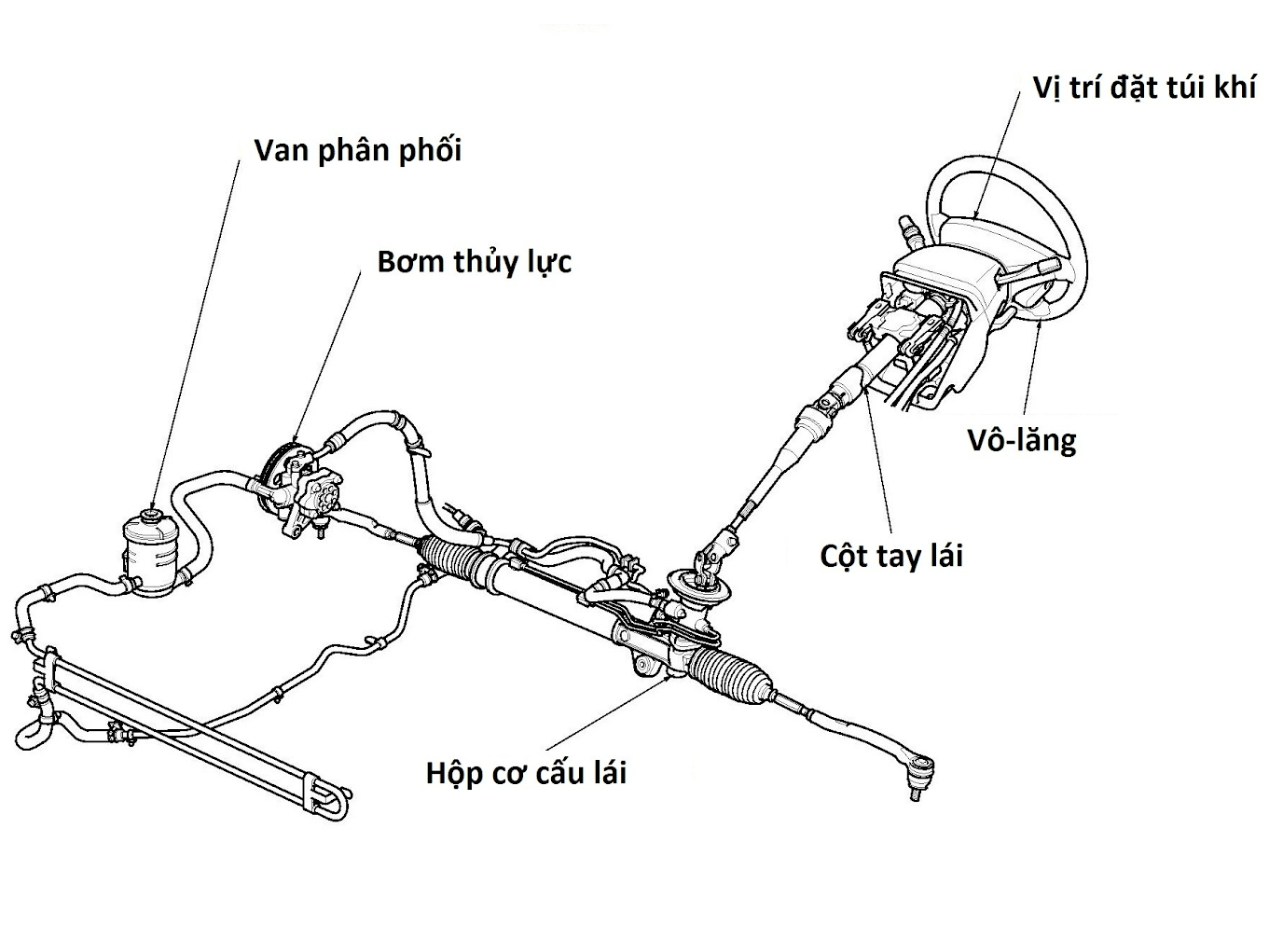
 Hình 1. Sơ đồ cấu trúc hệ thống lái
Hình 1. Sơ đồ cấu trúc hệ thống lái
 Hình 1. Sơ đồ cấu trúc hệ thống lái
Hình 1. Sơ đồ cấu trúc hệ thống lái- Hệ thống lái thuần cơ khí
- Hệ thống lái trợ lực thủy lực
- Hệ thống lái trợ lực thủy lực điều khiển điện.
- Hệ thống lái trợ lực điện
- Hệ thống lái chủ động AFS
- Hệ thống lái Steer by wire
- Hệ thống lái tự động
A. Hệ thống lái thuần cơ khí
Hệ thống lái thuần cơ khí được bố trí trên các xe thế hệ đầu tiên từ thập kỷ 50. Cho đến này bản thân các bộ phận cơ khí hệ thống lái cũng có nhiều cải tiến. Các nghiên cứu về hệ thống lái cơ khí chủ yếu tập trung vào khả năng quay vòng ô tô trong thời gian ngắn nhất trên một diện tích bé; giữ cho xe ổn định chuyển động thẳng, lực tác dụng lên vành tay lái nhỏ, đảm bảo động lực quay vòng đúng để các bánh xe không bị trượt, sự tương ứng động học giữa dẫn động lái và bộ phận dẫn hướng của hệ thống treo, khả năng ngăn được các va đập của các bánh xe dẫn hướng lên vành tay lái, quan hệ chuyển động giữa bánh xe bên phải và bên trái.
Hệ thống lái thuần cơ khí bao gồm hai thành phần chính: dẫn động lái và cơ cấu lái. Cơ cấu lái là bộ chuyển đổi mô men giữa góc quay vòng các bánh xe dẫn hướng và góc quay vành lái lớn. Dẫn động lái truyền chuyển động từ cơ cấu lái đến các bánh xe dẫn hướng đồng thời đảm bảo cho các bánh xe dẫn hướng quay quanh trụ đứng với vận tốc và góc quay khác nhau nhằm tránh hiện tượng trượt khi quay vòng.
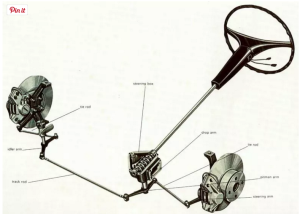
Hình 2 Hệ thống lái thuần cơ khí
 Hình 2 Hệ thống lái thuần cơ khí
Hình 2 Hệ thống lái thuần cơ khíNhìn chung hệ thống thuần lái cơ khí đáp ứng được yêu cầu ban đầu để xe chuyển động trên đường đảm bảo các bánh xe ít bị trượt khi quay vòng. Tuy nhiên có nhiều vấn đề cần cải tiến trên hệ thống lái này:
-
Người lái phải sử dụng 100% năng lượng để thực hiện việc quay vòng bánh xe trong quá trình chuyển động, đồng thời cũng tiếp nhận những phản hồi không mong muốn từ mặt đường điều này làm cho người lái cảm thấy mệt mỏi khi sử dụng. -
Quỹ đạo chuyển động quay vòng chịu ảnh hưởng của góc quay thân xe và tình trạng đánh lái. Trong khi hệ thống lái này chỉ tập trung vào bài toán góc quay dẫn hướng bánh chuyển động theo vô lăng do đó ảnh hưởng của dịch chuyển thân xe đặc biệt khi đánh lái ở tốc độ cao là rõ nét và chưa kiểm soát được. -
Chưa tối ưu khối lượng, kích thước các chi tiết cơ khí nên cơ cấu công kềnh, nặng chiếm nhiều không gian bố trí. Khả năng va đập khi sảy ra sự cố ảnh hưởng nhiều đến người sử dụng là rõ nét.
Hệ thống lái thuần cơ khí chủ yếu trang bị cho các dòng xe từ thập kỷ 70-80. Trên thị trường Việt Nam một số ít các xe cũ vẫn lưu thông sử dụng loại hệ thống lái này.
B. Hệ thống lái trợ lực thủy lực (HPS-Hydraulic Power Steering)
Hệ thống lái có trợ lực thủy lực là sự cải tiến của hệ thống lái thuần cơ khí nhắm giải quyết vấn đề chính là hỗ trợ một phần năng lượng của người lái trong quá trình điều khiển xe tạo cảm giác thoải mái khi lái xe. Tùy theo thiết kế và chế độ chuyển động của xe, năng lượng hỗ trợ của bộ trợ lực do động cơ tạo ra có thể lên đến 80% năng lượng tổn hao cho việc đánh lái. Việc trang bị hệ thống lái trợ lực sẽ giúp cho người lái ít tổn hao năng lượng khi quay vòng xe và giảm được những va đập từ bánh xe lên vô lăng. Không những thế, nó còn nâng cao được tính năng an toàn trong trường hợp bánh xe gặp sự cố. Đây là một trong những ưu điểm nổi bật hệ thống lái trợ lực thủy lực của hệ thống lái trang bị trên ô tô.
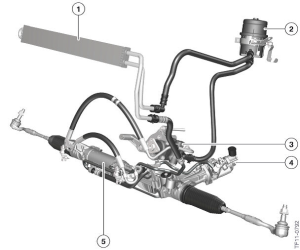
Hình 3. Bố trí hệ thống lái với trợ lực lái
 Hình 3. Bố trí hệ thống lái với trợ lực lái
Hình 3. Bố trí hệ thống lái với trợ lực lái(1; Bộ tản nhiệt, 2; Bình chứa dầu trợ lực, 3; Bơm dầu trợ lực, 4; Bộ phận cảm biến mô men cản quay điều khiển van trợ lực thủy lực, 5; Thước lái và xylanh thủy lực)
Vấn đề chính cần giải quyết là tỷ lệ trợ lực phù hợp với điều kiện chạy xe và sự thay đổi góc đánh lái. Có thể thấy rõ: Khi di chuyển ở vận tốc thấp ta cần trợ lực nhiều, ngược lại tốc độ cao cần hạn chế trợ lực, Vị trí vô lăng vị trí trung hòa (chạy thẳng) cần ít trợ lực, đánh lái nhiều càng xa vị trí trung hòa tỷ lệ trợ lực càng tăng. Hay nói các khác hệ thống trợ lực thủy lực cần bố trí thay đổi tỷ lệ trợ lực theo điều kiện chuyển động theo hai thông số chính: góc đánh lái và vận tốc xe.
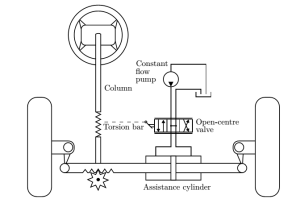
Hình 4. Sơ đồ nguyên lý hệ thống lái trợ lực thủy lực
 Hình 4. Sơ đồ nguyên lý hệ thống lái trợ lực thủy lực
Hình 4. Sơ đồ nguyên lý hệ thống lái trợ lực thủy lựcĐiểm quan trọng nhất của hệ thống lái trợ lực thủy lực chính là thanh xoắn (torsion bar) bố trí trên trục lái. Thanh xoắn này đóng vai trò bộ phận cảm biến mô men. Góc đánh lái càng lớn mô men xoắn càng lớn làm cho thanh xoắn biến dạng nhiều khi đó cửa van dầu trợ lực được mở rộng áp lực dầu trợ lực tăng theo. Vận tốc chạy xe tăng làm cho mô men cản tại bánh xe dẫn hướng giảm làm cho biến dạng thanh xoắn cũng giảm độ mở van trợ lực, lực trợ lực giảm theo điều này làm hạn chế khả năng trợ lực khi tăng vận tốc mốt cách tự nhiên.
Hệ thống trợ lực lái này ngoài ưu điểm tạo cảm giác nhẹ khí lái xe vẫn còn một số nhược điểm cần cải tiến: Việc điều khiển các van dầu trợ lực bằng thanh xoắn hoàn toàn bằng cơ khí nên dải tốc độ hạn chế (góc biến dạng thanh xoắn được giới hạn), đặc biệt khi chạy ở tốc độ cao công suất bơm dầu tăng dẫn đến áp lực dầu tăng theo, việc hạn chế trợ lực trở lên khó khăn (mất cảm giác lái), bơm dầu làm việc liên tục (do nối trực tiếp với động cơ) làm tổn hao năng lượng trong tình trạng không cần trợ lực.
Trên thị trường Việt Nam hiện nay rất nhiều dòng xe được trang bị hệ thống lái này do giá thành rẻ và phù hợp tốc độ chạy xe hạn chế (<120km/h)
C. Hệ thống lái trợ lực thủy lực điều khiển bằng điện tử (EHPA)
Trên hệ thống lái trợ lực thủy lực là phiên bản cải tiến của hệ thống lái trợ lực thủy lực (được phát triển từ thập kỷ 90). Ngoài hai bộ phận là cơ cấu lái và dẫn động lái như hệ thống lái thuần cơ khí, hệ thống lái trợ lực lái thủy lực được cải tiến. Đặc điểm quan trọng của hệ thống này là thanh xoắn cảm biến mô men đánh lái không trực tiếp điều khiển van trợ lực. Độ biến dạng của thanh xoắn được chuyển thành tín hiệu điện gửi đến hộp MCU điều khiển trợ lực. Hộp MCU điều khiển trợ tổng hợp các tín hiệu chạy xe, tính toán và xác định phần tỷ lệ trợ lực từ đó quyết định áp lực trợ lực lái.
So sánh với hệ thống lái trợ lực thủy lực; hệ thống lái trợ lực điều khiển bằng điện tử có nhiều ưu điểm hơn như; Dải làm việc làm việc của trợ lực đa dạng đáp ứng các dải tốc độ khác nhau đặc biệt là dải tốc độ cao (tạo cảm giác lái), tạo sự thoải mái khi lái xe.
Hình 5. Sơ đồ nguyên lý hệ thống lái trợ lực thủy lực điều khiển điện tử
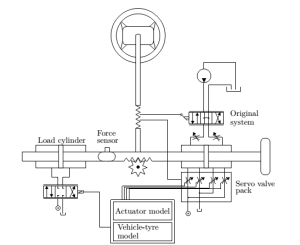
Hình 6. Hệ thống lái trợ lực thủy lực điều khiển điện tử (hãng BMW)

Trên thị trường Việt Nam hệ thống lái trợ lực thủy lực điều khiển điện thường được trang bị cho các dòng xe hạng trung và một số xe hạng sang.
D. Hệ thống lái trợ lực điện tử (ESP)
Hệ thống lái trợ lực điện phát triển cùng thời điểm với hệ thống trợ lực lái thủy lực điều khiển điện tử. So với hệ thống lái trợ lực thủy lực hệ thống lái trợ lực điện tử có nhiều ưu điểm hơn. Hệ thống lái trợ lực thủy lực điều khiển điện tử sử dụng bộ trợ lực thủy lực thì với bơm thủy lực gắn với động cơ nên hoạt động liên tục trong quá trình chạy xe gây lãng phí công suất khi không sử dụng trợ lực lái, thêm vào đó dầu trợ lực lái là một nhân tố gây ô nhiễm môi trường. Kết cấu của hệ thống lái trợ lực điện tử cũng gọn hơn.
Cải tiến quan trong của hệ thống này là; thay thế lực tác dụng từ bơm dầu trợ lực bằng động cơ điện. Mô tơ điện được điều khiển bằng hộp điều khiển nên các chế độ trợ lực được thay đổi một cách linh hoạt. Hộp điều khiển ECU được lập trình dựa trên thuật toán điều khiển; và mô hình toán điều khiển trợ lực hệ thống lái. Tùy theo từng hãng xe, mô hình điều khiển được sử dụng có sự khác nhau. Tuy nhiên, có một đặc điểm chung nhất đó là các đặc tính trợ lực được xây dựng dựa trên đặc tính cản từ mặt đường. Trong hệ thống lái trang bị trên ô tô này, cảm biến mô men cản (bố trí trên thanh xoắn) sẽ xác định mô men cản từ mặt đường tác dụng lên hệ thống; kết hợp với cảm biến vận tốc và các thông số chạy xe phần mềm sẽ quyết định trợ lực tỷ lệ trợ lực thông qua việc điều khiển trực tiếp mô tơ điện.
|
|
|
Trên thị trường xe Việt Nam hệ thống lái trợ lực điện được trang bị cho các dòng xe hạng trung và một số xe hạng sang.
E. Hệ thống lái chủ động (AFS – Active Front Steering)
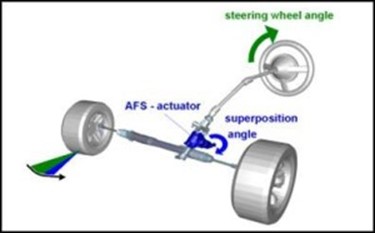
Hệ thống lái chủ động AFS được thiết kế dựa trên phân tích; về hướng chuyển động thực tế của xe khi lưu thông ở các tốc độ khác nhau tại các điều kiện khác nhau. Khi ô tô chuyển động ở dải tốc độ thấp; hướng chuyển động của ô tô được quyết định bởi góc đánh lái. Tuy nhiên khi vận tốc chuyển động lớn hơn 60 Km/h; ảnh hưởng của lực quán tính tác động lên thân xe làm xoay thân xe (do lốp biến dạng và ảnh hưởng hệ thống treo) là rõ nét. Nói cách khác hướng chuyển động của ô tô phụ thuộc vào hai tín hiệu góc đánh lái và góc xoay thân xe.
Điểm quan trong hệ thống lái này là; trên trục lái nối giữa Vô lăng và cơ cấu lái được bố trí thêm bộ chấp hành AFS (AFS actuator) – cơ cấu thay đổi tỷ số truyền được thay đổi theo tình trạng chạy xe. Trên hệ thống này xuất hiện thêm cảm biến xoay thân xe; tín hiệu từ cảm biến này kết hợp với tín hiệu vận tốc; góc đánh lái; vận tốc đánh lái được gửi đến hộp điều khiển. Tín hiệu từ bộ điều khiển quyết định tỉ số truyển tại bộ chấp hành.
Hình 8: Hệ thống lái AFS
Hình 9. Góc xoay thân xe do biến dạng lốp
Hệ thống lái AFS kết hợp với bộ trợ lực; tạo thành hệ thống lái trang bị trên ô tô cho các xe hạng sang. Bộ trợ lực điện này có thể được bố trí trên trục lái (EPAS-column); bố trí trên thước lái (EPAS-rack) hay được gắn thêm bộ phận giảm tốc và bố trí trên thước lái (EPAS-pinion); đặt song hành cùng với thước lái (EPAS-dual-pinion). Hệ thống trợ lực điện có nhiều ưu điểm hơn hệ thống lái trợ lực thủy lực như; điều khiển nhẹ hơn; không chiếm không gian nhiều và không làm tiêu tốn nhiều công suất của động cơ.
|
EPAS-column |
EPAS-rack |
EPAS-pinion |
EPAS-dual-pinion |
Hình 10. Các loại hệ thống lái trợ lực điện kết hợp với AFS
F. Hệ thống lái Steer by wire
Với các hệ thống lái đã trình bày ở trên; khi quay vòng ở các tốc độ khác nhau người lái chỉ kiểm soát được một số trạng thái động lực học của xe. Ô tô chỉ có thể được kiểm soát hoàn toàn khi quay vòng với hệ thống lái điện (Steer by wire). Trong các năm gần đầy, hệ thống lái này đang được tập trung nghiên cứu. Đây là hệ thống lái có khả năng tạo ra lực hỗ trợ lái xe quay vành lái với 100% năng lượng. Khái niệm Steer by wire(SBW) được hình thành dựa trên mong muốn; xây dựng hệ thống lái đáp ứng được các tình trạng chuyển động theo mong muốn của người điều khiển xe khi quay vòng. Hệ thống Steer by wire có thể được chia thành hai hệ thống: hệ thống Steer by wire độc lập và hệ thống Steer by wire tích hợp. Hệ thống Steer by wire tích hợp với đặc điềm hai bánh dẫn hướng liên kết với nhau qua hình thang lái.
|
|
|
Hình 1. 8 Kiểu hệ thống lái SBW
a)Hệ thống tích hợp; b)Hệ thống độc lập
Đặc điểm hệ thống Steer by wire; độc lập với đặc điểm mỗi bánh xe dẫn hướng bố trí một động cơ điều khiển. Việc điều khiển một cách độc lập tại các bánh xe; có ưu điểm giúp tỉ lệ thay đổi góc dẫn hướng bánh xe một cách độc lập theo lý thuyết quay vòng. Tuy nhiên với công nghệ hiện nay; các nghiên cứu mới tập trung vào hệ thống Steer by wire tích hợp. Sơ đồ tổng thể về hệ thống điện như sau:
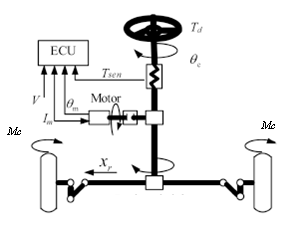
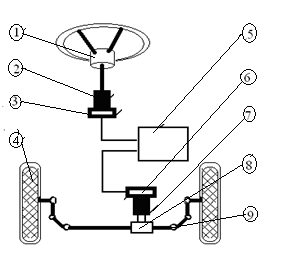
Hình 10. Hệ thống lái Steer By Wire
1. Vành lái; 2. Mô tơ tạo cảm giác; 3. Hộp điều khiển; 4. Cảm biến tốc độ, mô men trục lái; 5. Mô tơ điều khiển trục lái; 8. Cơ cấu lái; 9. Thanh lái
Trong hệ thống lái điện hình 1.9 phía dưới vành lái được bố trí một cảm biến vị trí góc quay. Khi người lái tác động vào vành lái; tín hiệu được cảm biến thu nhận và truyền qua hộp điều khiển; hộp điều khiển phân tích và xuất tín hiệu điều khiển động cơ gắn trên cơ cấu lái để điều khiển cơ cấu lái; đúng như tín hiệu mà người điều khiển mong muốn. Ở chiều ngược lại, trên cơ cấu lái cũng gắn một cảm biến thu thập tín hiệu phản hồi từ mặt đường; tín hiêu này được truyền ngược lên hộp điều khiển; hộp điều khiển phân tích và xuất tín hiệu điều khiển động cơ gắn dưới vành lái; để tạo cảm giác tác động phản hồi từ mặt đường đến người lái. Trên các hệ thống lái thông thường, mô men từ vành tay lái được truyền trực tiếp xuống cơ cấu lái thống qua trục lái. Tuy nhiên ở hệ thống lái điện; cơ cấu liên kết trung gian này đã được loại bỏ; chính vì vậy việc việc đồng bộ góc quay giữa vành tay lái và cơ cấu lái; cũng như những tác động phản hồi từ mặt đường lên vành lái được xem là một nhiệm vụ quan trọng.
Bộ điều khiển hệ thống lái đóng vai trò then chốt trong quá trình điều khiển xe. Mọi thông tin sẽ được xử lí bằng điện tử nên khả năng phản ứng với những thông tin trong quá trình lái xe sẽ nhanh hơn; không những thế nó còn có khả năng hạn chế phản hồi từ mặt đường; theo đó khi xe đi vào mặt đường xấu; gồ ghề những rung động từ mặt đường tác động lên vành lái sẽ được loại bỏ; nhờ vậy người lái không bị mỏi tay mà thoải mái hơn đồng thời không gian bố trí cho hệ thống lái giảm; trọng lượng giảm. Hệ thống lái này đã và đang nghiên cứu và ứng dụng trong các năm gần đây.
G. Hệ thống lái tự động
Hệ thống lái tự động được phát triển dựa trên 02 nền tảng công nghệ chính. Đó là xác định quỹ đạo chuyển động và điều khiển quỹ đạo chuyển động. Để xác định quỹ đạo chuyển động các cảm biến lidar; camera;cảm biến rada; các cảm biến khoảng cách được bố trí trên ô tô. Hộp điều khiển hệ thống lái tự động sẽ tổng hợp các thống tin từ cảm biến; để xác định quỹ đạo chuyển đông của ô tô. Quỹ đạo chuyển động làm đầu vào cho việc điều khiển hệ thống lái; động cơ; hệ thống truyền lực và hệ thống phanh.
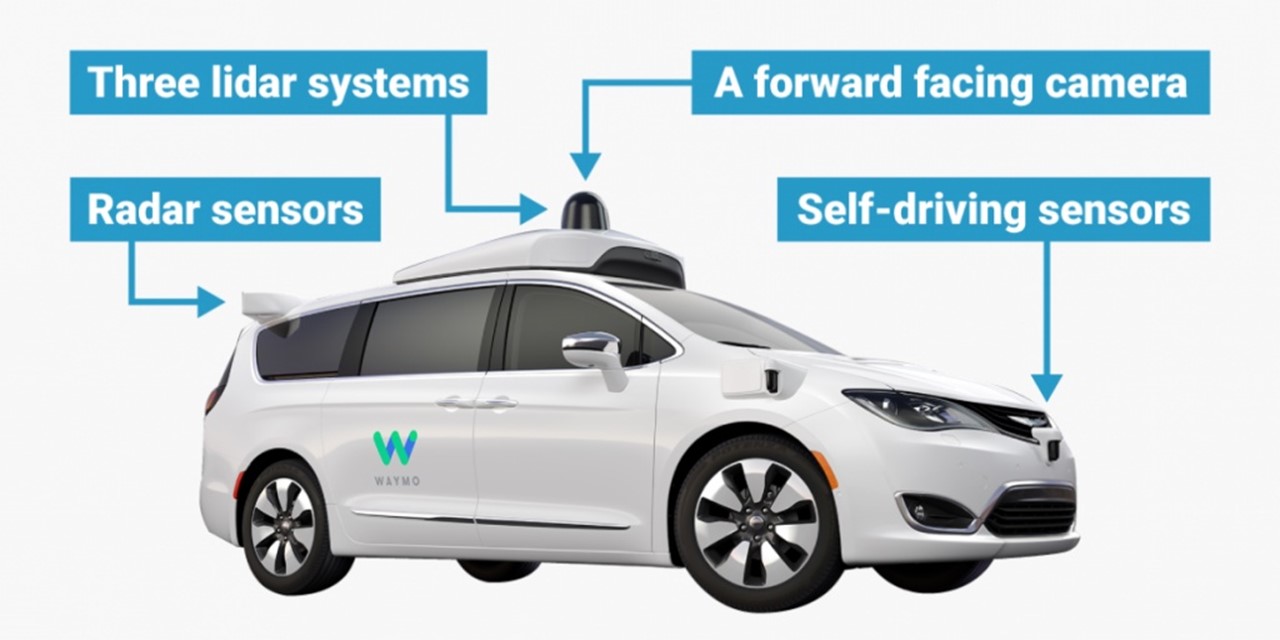
Hình 11. Ô tô sử dụng công nghệ lái tự động
Gara trực tuyến hi vọng qua bài viết này Bạn đã nắm rõ hệ thống lái trang bị trên ô tô hiện nay! Chúc Bạn thành công.
Bài viết liên Quan